احمد ذنون شيت1
1 مدرس في وزارة التربية العراقية.
بريد الكتروني: ahmed.20csp139@student.uomosul.edu.iq
HNSJ, 2024, 5(3); https://doi.org/10.53796/hnsj53/6
تاريخ النشر: 01/03/2024م تاريخ القبول: 08/02/2024م
المستخلص
تم بناء نظام جديد رباعي الابعاد (4D) شديد الاضطراب مع نقطتي اتزان غير مستقرة, وذلك من خلال الاقتران بين نظام Sprott-Bثلاثي الابعاد ونظام خطي ذي بعد واحد (1D) باستخدام استراتيجية اقتران (Coupling strategy). بالمقارنة مع الأنظمة التقليدية، يعتبر النظام الجديد بسيطًا لأنه يتكون من سبعة حدود مع حدين غير خطيين. نظرًا لطبيعة نقاط الاتزان، ينتمي هذا النظام إلى فئة الجواذب المتحفزة ذاتيًا (Self-excited). أخيرًا, تّمت دراسة مسألة التزامن (Synchronization) للنظام المقترح من خلال نظرية الاستقرار وأظهرت المحاكاة العددية موافقتها مع النتائج النظرية.
الكلمات المفتاحية: أسيات Lyapunov (LEs), متحفزة ذاتيًا, نظام Sprott-B, التزامن.
The 4D system is derived from the Sprott-B system
Ahmed T. Sheet1
1 Teacher at the Iraqi Ministry of Education
Email: ahmed.20csp139@student.uomosul.edu.iq
HNSJ, 2024, 5(3); https://doi.org/10.53796/hnsj53/6
Published at 01/03/2024 Accepted at 08/02/2024
Abstract
A new highly disordered four-dimensional (4D) system with two unstable equilibrium points was built by coupling a three-dimensional Sprott-B system with a one-dimensional (1D) linear system using a coupling strategy. Compared with traditional systems, the new system is simple because it consists of seven terms with two nonlinear terms. Due to the nature of the equilibrium points, this system belongs to the class of self-excited attractors. Finally, the issue of synchronization of the proposed system was studied through stability theory, and numerical simulation showed agreement with theoretical results.
- المقدمة
اكتسب تزامن الأنظمة غير الخطية المتصلة عبر شبكات واسعة النطاق شعبية في مجموعة متنوعة من التطبيقات، مثل شبكات الطاقة وشبكات الاستشعار وعلم الأحياء. في عام 1990 ، قدم كل من Pecora و Carroll أنظمة ذات جواذب متحفزة ذاتيا حيث تعتبر الظاهرة الأولى في تزامن الفوضى [1] التي حظيت باهتمام كبير في مختلف المجالات مثل الهندسة [2] والترميز [3] ومجالات أخرى. يتم وصف التزامن الكامل (Complete (synchronization من خلال تكافؤ نمو متغيرات الحالة بمرور الوقت. في هذه الأيام، يستخدم معظم علماء الرياضيات والفيزياء والمهندسين طريقة Lyapunov الثانية كأداة رئيسية في أعمالهم لتحديد استقرار الأنظمة الديناميكية [4].
يشير هذا البحث بشكل أساسي إلى أن التزامن الفوضوي لنظام شديد الاضطراب الجديد الذي قدمه Sprott كشف عن تسعة عشر نظامًا [5] بما في ذلك نظام Sprott-B المعروف، حيث تم الحصول على LEs بحيث يكون أكبر عنصر موجب من LEs هو 0.2169 وهو أكبر من النظام الأصلي، مما شجعنا على تكوين نظام جديد هو أننا تمكنا من تكوين نظام يحتوي 7 حدود، و يعتبر أبسط الأنظمة من هذا النوع, هذا هو أحد شروط تكوين النظام التي ذكرها Sprott [6]. الجدول )1( يلخص بعض أنظمة 4D المتاحة، ويركز على أهم الخصائص، بما في ذلك العدد الإجمالي للحدود، وآسية Lyapunov و كذلك سلوك الجواذب.
جدول (1) ملخص تصنيفات مختلفة للأنظمة الفوضى 4D.
| التسلسل | سلوك النظام | عدد الحدود | سلوك الجواذب | المصدر | |
| فوضى | 10 | مخفية | [7] | ||
| شديد الاضطراب | 9 | مخفية | [8] | ||
| شديد الاضطراب | 9 | متحفزة ذاتياً | [9] | ||
| فوضى | 10 | مخفية | [10] | ||
| شديد الاضطراب | 11 | متحفزة ذاتياً | [11] | ||
| شديد الاضطراب | 12 | متحفزة ذاتياً | [12] | ||
| فوضى | 8 | مخفية | [13] | ||
| فوضى | 8 | مخفية | [14] | ||
| فوضى | 8 | مخفية | [15] | ||
| شديد الاضطراب | 9 | متحفزة ذاتياً | [16] | ||
| فوضى | 9 | مخفية | [17] | ||
| شديد الاضطراب | 7 | متحفزة ذاتياً | هذا العمل |
- وصف النظام
لإنشاء أنظمة جديدة تعتمد على الأنظمة متوفرة سابقًا، يمكن أن نستخدم سيطرة التغذية الراجعة (State feedback controller) واستراتيجية الاقتران (Coupling strategies). تتطلب الإستراتيجية الأولى إدخال متغير جديد في النظام الأصلي بالإضافة إلى المعادلة المقابلة. بينما بالنسبة للاستراتيجية الثانية، هناك حاجة فقط إلى الجمع بين نظامين مختلفين.
في عام 1994 اكتشف الباحث Sprott تسعة عشر نظاما تتميز ببساطتها. يُعرَّف النظام الفوضوي ثلاثي الأبعاد Sprott-B بأنه [5]:
(1)
من الواضح أن هذا النظام يتكون من خمسة حدود فقط مع آسية Lyapunov موجبة واحدة
وكما يلي:
وأكبر أس يساوي . استنادًا إلى إستراتيجية الاقتران والنظام أعلاه، يتم إضافة نظام D1 ذي حدين خطيين بما في ذلك معلمة اقتران إلى النظام (1)، والذي ينتج نظامًا بسيطًا جديدًا Sprott-Bرباعي الابعاد شديد الاضطراب, يتم تقديمه على النحو التالي:
(2)
ان النظام الجديد (2) يتكون من سبعة حدود من ضمنها اثنان غير خطية. كما انه نظام شديد الاضطراب (Hyperchaotic), يمتلك نقطتي اتزان ذوات جواذب متحفزة ذاتيا عند مع القيمة الابتدائية وعند مع , كما موضح في الشكل (1).
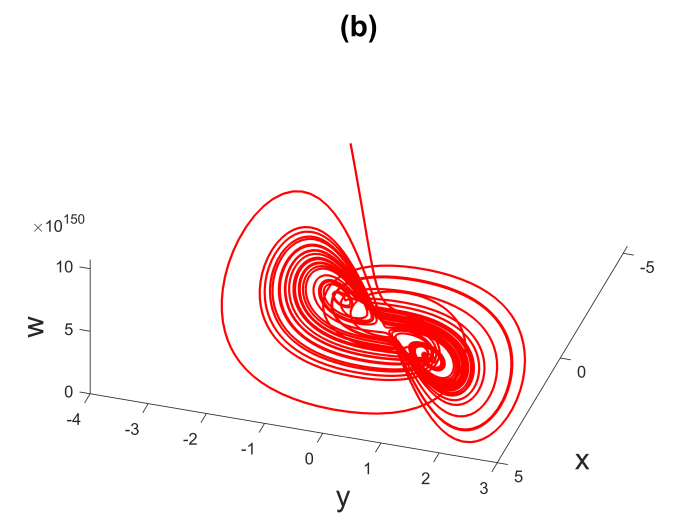
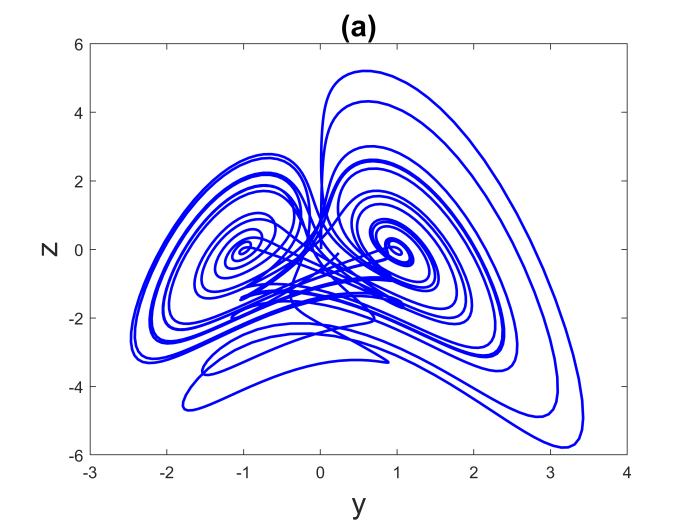
الشكل (1) جواذب النظام المتولد مع في المستوي (a): , في فضاء الطور(b): .
- تحليل النظام
يتم تحليل بعض الخصائص الأساسية للنظام الجديد (2) نظريًا وعدديًا، أي نقاط الاتزان والاستقرارية و آسية Lyapunov وبُعد Kaplan-Yorke.
- نقاط الاتزان و الاستقرارية (Equilibrium Points and Stability)
في الرياضيات، وتحديداً في المعادلات التفاضلية، تعتبر نقاط الاتزان حلاً ثابتًا للمعادلات التفاضلية. لإيجاد نقاط الاتزان للنظام (2)، نحل المعادلات التالية:
(3)
فان النظام المتولد يمتلك نقطتي اتزان متناظرتين هما و
. المصفوفة اليعقوبية (Jacobian matrix) عند و المعادلة المميزة (Characteristic equation) للنظام (2) يتم عرضهم بالتوالي على النحو التالي:
(4)
(5)
اما أثر المصفوفة )4) فيحسب كما يلي:
بما انه أثر (), فإن النظام يكون محافظاً (Conservative).
لتحديد استقرارية المعادلة (2) باستخدام معيار Routh-Hurwitz [18],
حيث , و بذلك تكون اذن النظام المتولد (2) غير مستقر (Unstable) وبذلك يصنف ذا جواذب متحفزة ذاتيا (Self-excited) شديد الاضطراب (Hyperchaotic).
ملاحظة: عند حل المعادلة (5) نحصل على
وبذلك النقاط تصبح Saddle-focus [5].
- آسية ليابونوف (Lyapunov Exponent)
باستخدام المعلمة و القيمة الابتدائية فأن آسية Lyapunov للنظام الجديد (2) هي:
(6)
نلاحظ أن اكبر آسية Lyapunov للنظام الجديد (2) هي وبذلك تكون اكبر من النظام الاصلي (1), , مما يدل على ان النظام الجديد اكثر كفاءة من النظام الاصلي [19], كما إن النظام الجديد يمتلك السمة اثنتان من آسية Lyapunov الموجبة كما موضح في الشكل (2).
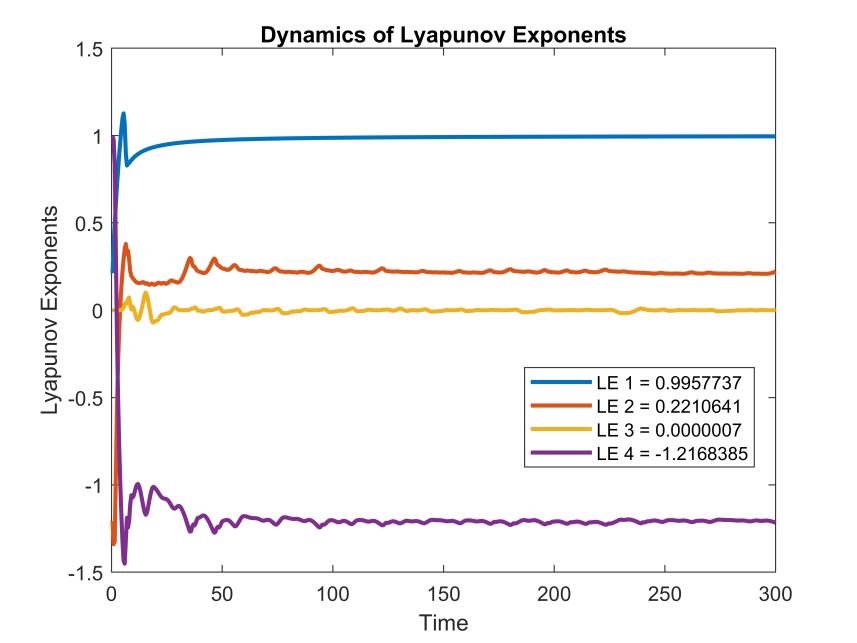
الشكل (2) آسية Lyapunov للنظام (2) عند القيمة الابتدائية
كذلك مجموع آسية Lyapunov و بما انه , اذن النتائج متطابقة مع الحلول العددية (Wolf’s Algorithm).
و يتم حساب بعد Lyapunov (بعد Kaplan-Yorke) للنظام (2) هو:
من خلال برنامج Wolf’s algorithm فان النظام المتولد دائما يكون شديد الاضطراب تحت القيمة الابتدائية و الجدول (2) يعرض هذا السلوك مع قيم مختلفة للمعلمة .
جدول (2) للنظام (2) مع القيمة الابتدائية وقيم مختلفة للمعلمة .
| اشارات | السلوك | التسلسل | |||||
| 0.3 | شديد الاضطراب | ||||||
| 0.09 | شديد الاضطراب | ||||||
| 0.58 | 1.0016 | 0.2135 | 0.0002- | 1.2149- | شديد الاضطراب | ||
| 0.587 | 1.0017 | 0.2097 | 0.0000 | 1.2115- | شديد الاضطراب | ||
| 0.619 | 1.0019 | 0.2232 | 0.0000 | 1.2251- | شديد الاضطراب | ||
| 0.914 | 1.0031 | 10.214 | 0.0003 | 1.2175- | شديد الاضطراب |
- سلوك التعايش (Coexistence of attractors)
باستخدام فضاء الطور, فأن جواذب النظام المتولد تتمثل في الشكل (3) تحت نفس المعلمة و القيم الابتدائية المتناظرة, القيمة الاولى باللون الأحمر و القيمة الثانية و باللون الازرق. و الشكل (4) تحت المعلمة مع القيم الابتدائية المتناظرة, القيمة الاولى (أحمر) و القيمة الثانية (ازرق).
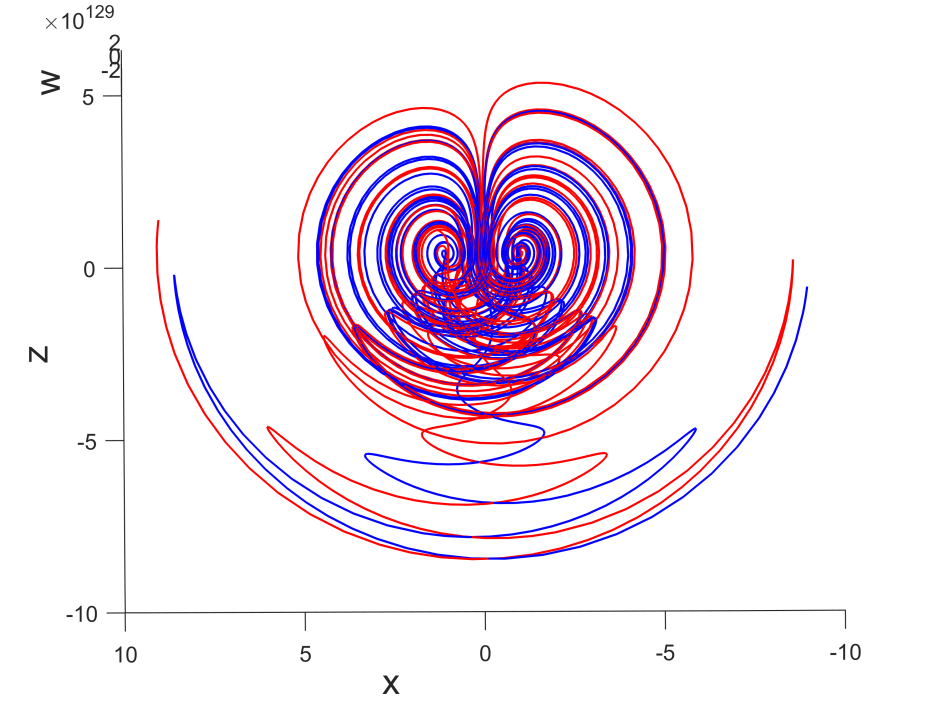
الشكل (3) الفضاء x-z-w, التعايش لجاذبين مع والقيمة الابتدائية المتناظرة (أحمر) و (ازرق).
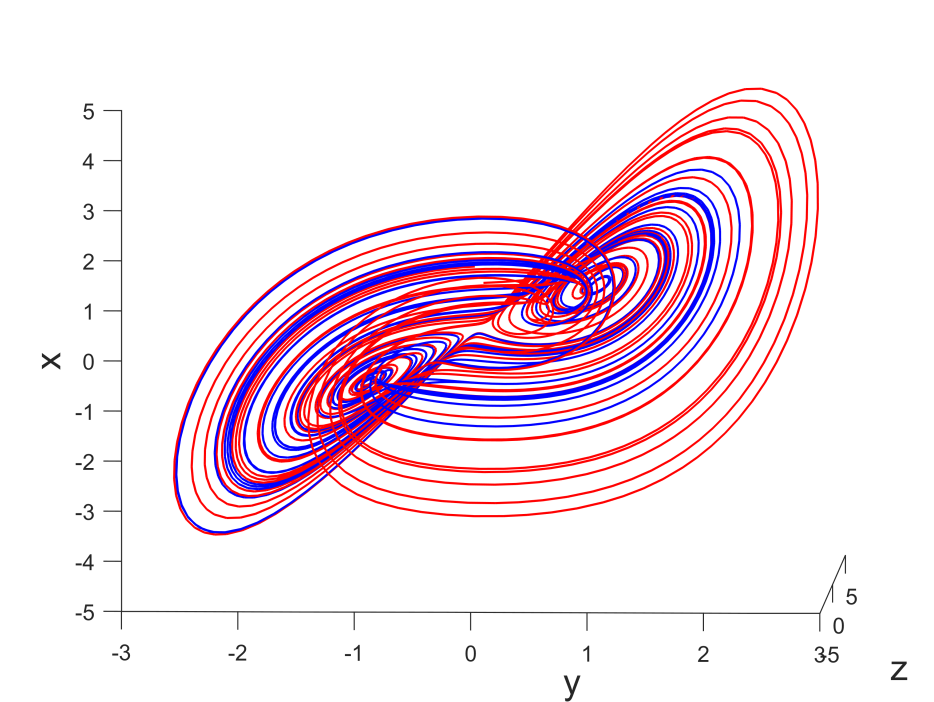
الشكل (4) الفضاء x-y-z, التعايش لجاذبين مع والقيم الابتدائية المتناظرة (أحمر) و (ازرق).
- التزامن الكامل (synchronization Complete)
يمكن تعريف نظامي القيادة (Drive) و الاستجابة (Response) للنظام الجديد (2) من خلال المعادلتين (7) و (8),على التوالي:
(7)
(8)
و نعرف خطأ التزامن (Synchronization error) بين النظامين (7) و (8) كالتالي:
(9)
يطلق على هذا التزامن بالتزامن الكامل, حيث ان هي مصفوفة القياس و ان
وبذلك فإن مصفوفة القياس هي مصفوفة الوحدة.
بتطبيق العلاقة (9) نحصل على خطا النظام الديناميكي بين النظامين (7) و (8) في المعادلة (10).
(10)
و لتحقيق التزامن يجب تطبيق الشرط التالي:
(11)
مبرهنة: إذ تم تصميم وحدة السيطرة (Controller) كالتالي:
(12)
فان نظام الاستجابة يتبع نظام القيادة.
البرهان : بتعويض السيطرة (12) في المعادلة (10), نحصل على:
(13)
و باختيار دالة Lyapunov نحصل على:
(14)
و مشتقة المعادلة (14) بالنسبة للزمن تكون:
(15)
حيث يؤدي الى . كما ان على . السيطرة (12) يحقق عدديا التزامن الكامل (synchronization Complete). كما موضح في الشكلين (5) و (6), التزامن الكامل الحاصل بين النظامين (7) و (8) مع القيم الابتدائية و , وهذا يؤكد صحة النتائج النظرية.
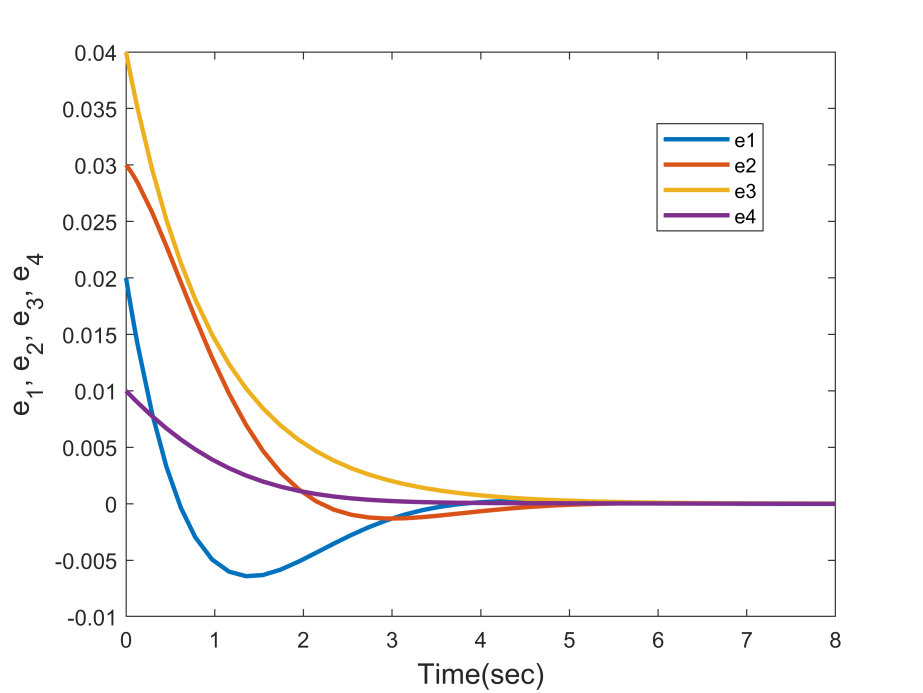
الشكل (5) خطأ التزامن (Synchronization error) مع السيطرة (12).
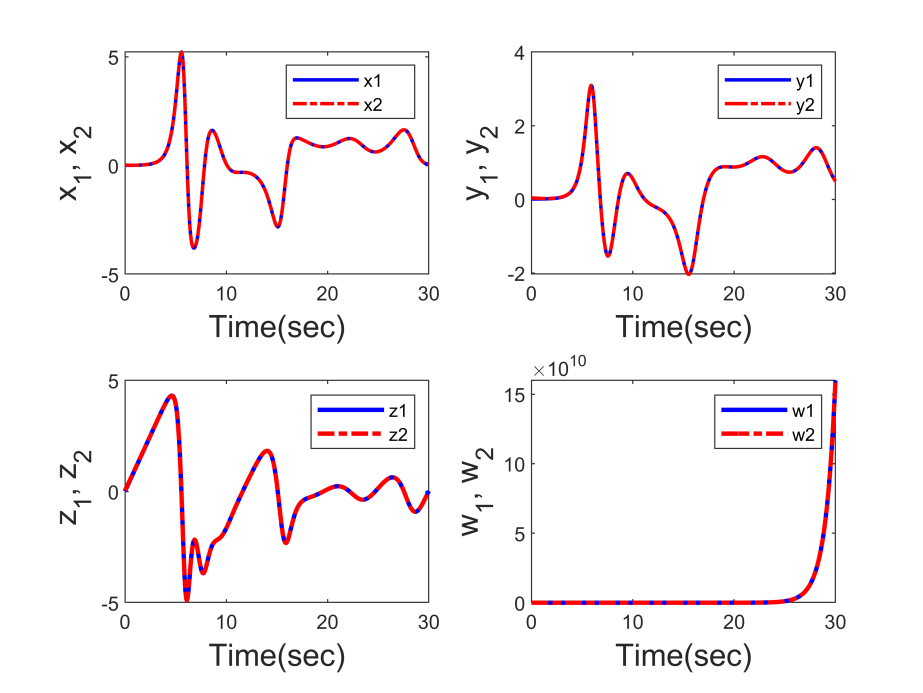
الشكل (13.2) التزامن الكامل (The complete synchronization).
- المستخلص
بالاعتماد على نظام Sprott-B المعروف وطريقة الاقتران، تم تقديم نظام جديد بسيط شديد الاضطراب رباعي الأبعاد مع سبعة حدود. يحتوي النظام المقترح على نقطتي اتزان غير مستقرتين وينتميان إلى فئة الجواذب المتحفزة ذاتيًا، بالإضافة إلى أنه يحتوي على ميزة (n-2) من آسية Lyapunov الموجبة، و أكبر أس Lyapunov التي تم الحصول عليها هي أكبر من النظام الأصلي. نعتقد أن العمل البحثي يجب أن يكون مفيدًا ويمكن تعيينه للمساهمة في المؤلفات العلمية حول طرق المزامنة الكاملة التي قد يكون لها تطبيقات في مختلف مجالات الرياضيات التطبيقية مع الاتصال آلامن.
المصادر
[1] L. M. Pecora and T. L. Carroll, ‘Synchronization of chaotic systems’, Chaos, vol. 25, no. 9, p. 097611, Sep. 2015, doi: 10.1063/1.4917383.
[2] S. Santhanalakshmi, K. Sangeeta, and G. K. Patra, ‘Design of group key agreement protocol using neural key synchronization’, Journal of Interdisciplinary Mathematics, vol. 23, no. 2, pp. 435–451, Feb. 2020, doi: 10.1080/09720502.2020.1731956.
[3] S. A. Fadhel, Z. N. Al-Kateeb, and M. J. AL-Shamdeen, ‘An Improved Data Hiding using Pixel Value Difference Method and Hyperchaotic System’, J. Phys.: Conf. Ser., vol. 1879, no. 2, p. 022089, May 2021, doi: 10.1088/1742-6596/1879/2/022089.
[4] S. F. AL-Azzawi and A. S. Al-Obeidi, ‘Chaos synchronization in a new 6D hyperchaotic system with self-excited attractors and seventeen terms’, Asian-European J. Math., vol. 14, no. 05, p. 2150085, May 2021, doi: 10.1142/S1793557121500856.
[5] J. C. Sprott, ‘Some simple chaotic flows’, Phys. Rev. E, vol. 50, no. 2, pp. R647–R650, Aug. 1994, doi: 10.1103/PhysRevE.50.R647.
[6] J. C. Sprott, ‘A proposed standard for the publication of new chaotic systems’, Int. J. Bifurcation Chaos, vol. 21, no. 09, pp. 2391–2394, Sep. 2011, doi: 10.1142/S021812741103009X.
[7] Q. Deng, C. Wang, and L. Yang, ‘Four-Wing Hidden Attractors with One Stable Equilibrium Point’, Int. J. Bifurcation Chaos, vol. 30, no. 06, p. 2050086, May 2020, doi: 10.1142/S0218127420500868.
[8] Z. Wang, S. Cang, E. O. Ochola, and Y. Sun, ‘A hyperchaotic system without equilibrium’, Nonlinear Dyn, vol. 69, no. 1, pp. 531–537, Jul. 2012, doi: 10.1007/s11071-011-0284-z.
[9] S. Dadras, H. R. Momeni, G. Qi, and Z. Wang, ‘Four-wing hyperchaotic attractor generated from a new 4D system with one equilibrium and its fractional-order form’, Nonlinear Dyn, vol. 67, no. 2, pp. 1161–1173, Jan. 2012, doi: 10.1007/s11071-011-0060-0.
[10] M. A. Al-hayali and F. S. Al-Azzawi, ‘A 4D hyperchaotic Sprott S system with multistability and hidden attractors’, J. Phys.: Conf. Ser., vol. 1879, no. 3, p. 032031, May 2021, doi: 10.1088/1742-6596/1879/3/032031.
[11] H. Yu, G. Cai, and Y. Li, ‘Dynamic analysis and control of a new hyperchaotic finance system’, Nonlinear Dyn, vol. 67, no. 3, pp. 2171–2182, Feb. 2012, doi: 10.1007/s11071-011-0137-9.
[12] G. Laarem, ‘A new 4-D hyper chaotic system generated from the 3-D Rösslor chaotic system, dynamical analysis, chaos stabilization via an optimized linear feedback control, it’s fractional order model and chaos synchronization using optimized fractional order sliding mode control’, Chaos, Solitons & Fractals, vol. 152, p. 111437, Nov. 2021, doi: 10.1016/j.chaos.2021.111437.
[13] S. Zhang, Y. Zeng, Z. Li, M. Wang, X. Zhang, and D. Chang, ‘A novel simple no-equilibrium chaotic system with complex hidden dynamics’, Int. J. Dynam. Control, vol. 6, no. 4, pp. 1465–1476, Dec. 2018, doi: 10.1007/s40435-018-0413-3.
[14] J. P. Singh and B. K. Roy, ‘Multistability and hidden chaotic attractors in a new simple 4-D chaotic system with chaotic 2-torus behaviour’, Int. J. Dynam. Control, vol. 6, no. 2, pp. 529–538, Jun. 2018, doi: 10.1007/s40435-017-0332-8.
[15] J. P. Singh and B. K. Roy, ‘Coexistence of asymmetric hidden chaotic attractors in a new simple 4-D chaotic system with curve of equilibria’, Optik, vol. 145, pp. 209–217, Sep. 2017, doi: 10.1016/j.ijleo.2017.07.042.
[16] P. Prakash et al., ‘A Novel Simple 4-D Hyperchaotic System with a Saddle-Point Index-2 Equilibrium Point and Multistability: Design and FPGA-Based Applications’, Circuits Syst Signal Process, vol. 39, no. 9, pp. 4259–4280, Sep. 2020, doi: 10.1007/s00034-020-01367-0.
[17] V.-T. Pham, X. Wang, S. Jafari, C. Volos, and T. Kapitaniak, ‘From Wang–Chen System with Only One Stable Equilibrium to a New Chaotic System Without Equilibrium’, Int. J. Bifurcation Chaos, vol. 27, no. 06, p. 1750097, Jun. 2017, doi: 10.1142/S0218127417500973.
[18] L. Allen, Introduction to Mathematical Biology, An. Upper Saddle River, NJ: Pearson, 2006.
[19] P. Zhou, X. Hu, Z. Zhu, and J. Ma, ‘What is the most suitable Lyapunov function?’, Chaos, Solitons & Fractals, vol. 150, p. 111154, Sep. 2021, doi: 10.1016/j.chaos.2021.111154.